使用欧拉角、球坐标旋转相机
最近折腾了一下相机跟随相关的功能,期间做了两个小玩具。一个是用欧拉角简单地让相机随鼠标旋转,另一个则是用球面坐标系的思路实现球形环绕相机,都是根据鼠标拖动来改变相机相对目标的姿态和位置。
欧拉角
当鼠标按下后,会先获取鼠标目前点击的世界坐标点作为旋转的中心点,同时记录相机当前的旋转矩阵和世界坐标位置,也记录相机到目标中心点的View Space位置差 OffsetHandle。 鼠标在移动时,每一帧都累计鼠标在 X、Y 方向的增量。 得到新的俯仰角和偏航角后,就能生成一个新的Delta旋转矩阵。 把OffsetHandle通过Delta旋转矩阵来旋转,得到新的View Space位置差,再把它变换回世界空间,就得到新的OffsetHandle, 再加上将相机应用上新的Delta旋转矩阵,就可以使得相机看起来随着鼠标沿着欧拉角旋转。
球坐标
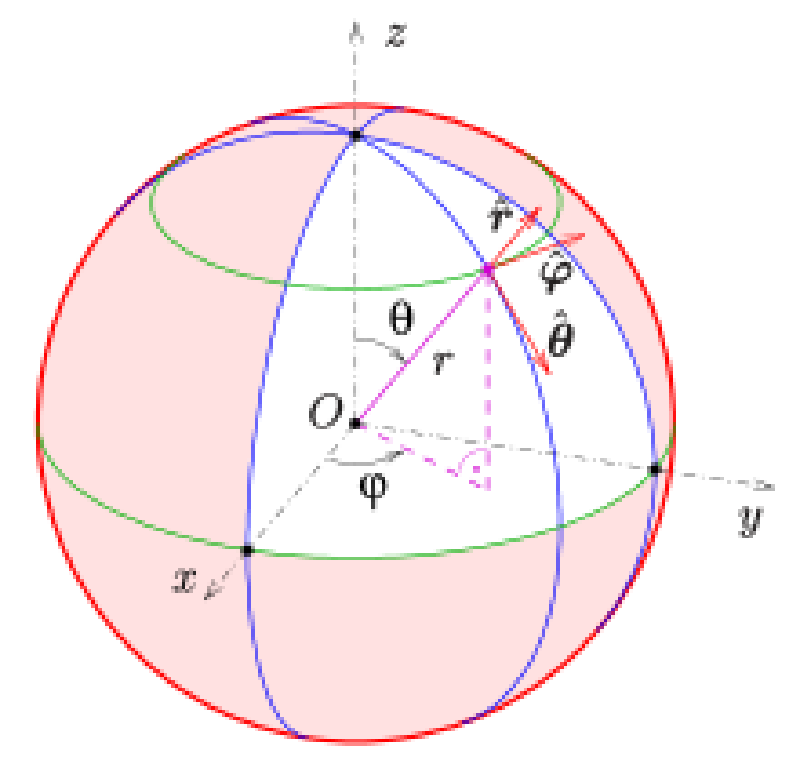
球形环绕的思路可以看作是欧拉角思路的进一步扩展,只不过不直接使用欧拉角来存储位置和旋转关系。 $$ x = r ⋅ sin(θ) ⋅ cos(φ)\ y = r ⋅ sin(θ) ⋅ sin(φ)\ z = r ⋅ cos(θ) $$ 由于实际代码中还要考虑到引擎世界坐标系的差异,所以最好在鼠标按下时,通过目标位置与点击点相减,就能得到当前相机在世界空间中的向量。进而求出对应的 r、θ、φ,并记住鼠标开始拖动时对应的“初始视图方向”。在每一次 Tick 中,根据鼠标移动增量更新 θ、φ,然后重新计算相机的坐标,再把它加回 LocationHandleRoot(即球心),就能让相机稳稳地保持在同一个球面半径上绕圈移动。
在代码中可以看到,FMath::Acos(LocationHandleFootRelative.Z / R) 就是对 θ 的求解,FMath::Atan2(LocationHandleFootRelative.Y, LocationHandleFootRelative.X) 则对 φ 做了求解。然后在更新相机位置后,再结合初始视图方向与新视图方向之间的夹角,通过四元数来进行细微纠正,以确保相机的朝向和我们期望的一致。此外,代码也做了夹角范围的限制,例如俯仰角 θ 被约束在 -89° 到 89° 之间,防止出现视角完全翻转的问题。
这种球坐标的好处就在于它比较容易做一些高级操作,例如流畅地实现绕目标旋转、限制上下视角以及只要修改 R 就能控制远近。此外,如果只需要简单绕固定轴旋转,那么欧拉角会更加直观一点。
Code: Euler
|
|
Code: Spherical
r::Tick(float DeltaTime) { Super::Tick(DeltaTime);
if (PlayerController->IsInputKeyDown(EKeys::RightMouseButton))
{
if (!bIsDragging)
{
bIsDragging = true;
FHitResult HitResult;
PlayerController->GetHitResultUnderCursor(ECC_Visibility, true, HitResult);
LocationHandleRoot = HitResult.ImpactPoint;
LocationHandleFootRelative = Pawn->GetActorLocation() - LocationHandleRoot;
R = LocationHandleFootRelative.Length();
Theta = FMath::Acos(LocationHandleFootRelative.Z / R);
Phi = FMath::Atan2(LocationHandleFootRelative.Y, LocationHandleFootRelative.X);
FMatrix ViewMatrix = FRotationMatrix(Pawn->GetActorRotation());
PositionInitialView = ViewMatrix.InverseTransformVector(-LocationHandleFootRelative);
}
else
{
float DeltaX, DeltaY;
PlayerController->GetInputMouseDelta(DeltaX, DeltaY);
constexpr float RotationSpeed = .5f;
Theta = FMath::ClampAngle(Theta + DeltaY * DeltaTime * RotationSpeed, MinPitch, MaxPitch);
Phi += DeltaX * DeltaTime * RotationSpeed;
LocationHandleFootRelative = {
R * FMath::Sin(Theta) * FMath::Cos(Phi),
R * FMath::Sin(Theta) * FMath::Sin(Phi),
R * FMath::Cos(Theta)
};
Pawn->SetActorLocation(LocationHandleRoot + LocationHandleFootRelative);
FRotator BaseRotation = (-LocationHandleFootRelative).Rotation();
FMatrix NewViewMatrix = FRotationMatrix(BaseRotation);
FVector CurrentViewDir = NewViewMatrix.
InverseTransformVector(LocationHandleRoot - Pawn->GetActorLocation());
FQuat CorrectionQuat = FQuat::FindBetweenVectors(PositionInitialView, CurrentViewDir);
FRotator FinalRotation = (BaseRotation.Quaternion() * CorrectionQuat).Rotator();
Pawn->SetActorRotation(FinalRotation);
}
}
else
{
bIsDragging = false;
}
if (bIsDragging)
{
DrawDebugPoint(GetWorld(), LocationHandleRoot, 10.0f, FColor::Red, false, -1.0f);
DrawDebugLine(GetWorld(), LocationHandleRoot, Pawn->GetActorLocation(), FColor::Green, false, -1.0f);
FVector CameraForward = Pawn->GetActorForwardVector() * 100.0f;
DrawDebugLine(GetWorld(), Pawn->GetActorLocation(),
Pawn->GetActorLocation() + CameraForward,
FColor::Blue, false, -1.0f);
}
}
void ASphereTester::BeginPlay() { Super::BeginPlay();
PlayerController = UGameplayStatics::GetPlayerController(GetWorld(), 0);
PlayerController->SetShowMouseCursor(true);
FInputModeGameAndUI InputModeGameAndUI;
InputModeGameAndUI.SetLockMouseToViewportBehavior(EMouseLockMode::DoNotLock);
PlayerController->SetInputMode(InputModeGameAndUI);
Pawn = PlayerController->GetPawn();
}
|
|